

Werdna
-
Posts
7 -
Joined
-
Last visited
-
I'm trying shotguns (~50 attached via decoupler to a core with a single afterburner) for drag race launch and they don't do much, maybe get the afterburner up to the second bar. Is it because I need to research ways to increase the recoil?
-
Trouble flying straight in drag race - any tips?
Werdna replied to Werdna's topic in Discussion & Feedback
Thanks. What do you mean by "put your logic on a release and set it to release at the start?" Do you mean to jettison the button at launch? Does it still work if it's not attached? By the same logic, should I detach/decouple thrusters when I hit 150 using speed sensor? I see that shotgun/magnet start is something I need to learn, but maybe as a bridge to that? -
Trouble flying straight in drag race - any tips?
Werdna replied to Werdna's topic in Discussion & Feedback
so are all these issues with stability bugs or intentional? Kerbal Space Program, for example, punishes you for imbalanced design, but it seems a lot more forgiving. -
Trouble flying straight in drag race - any tips?
Werdna replied to Werdna's topic in Discussion & Feedback
Using the tip about springs and central thrusters... This guy really wants to go left... crashes into top and stabilizes. Got my best time with it so far.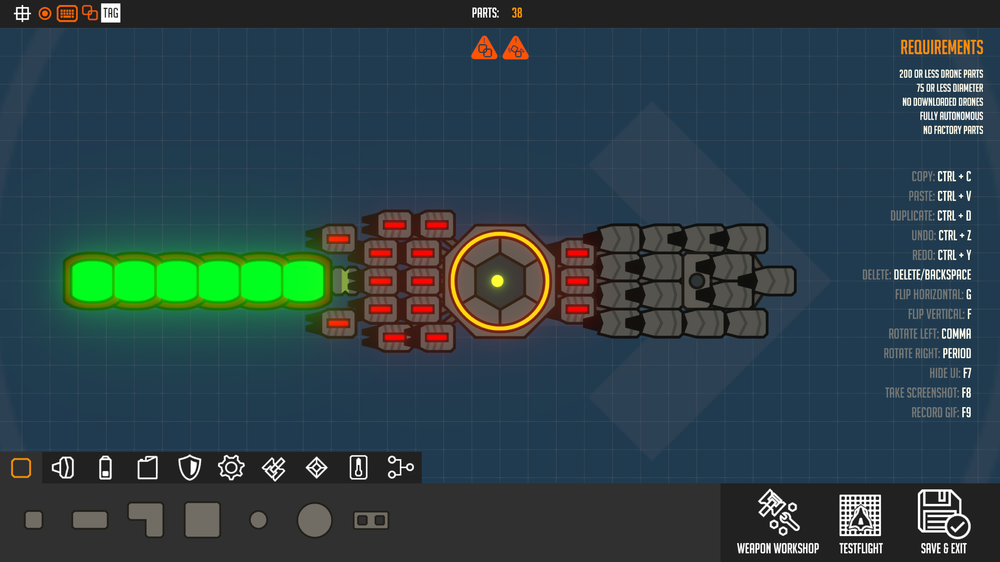
-
Trouble flying straight in drag race - any tips?
Werdna replied to Werdna's topic in Discussion & Feedback
It's a mess... even putting things closer to center doesn't help that much. The drift seems very random. -
Trouble flying straight in drag race - any tips?
Werdna replied to Werdna's topic in Discussion & Feedback
I've fiddled with it a bit more. Made a nice symmetrical design with 6 thrusters, 6 afterburners, and 3 large fuel tanks that drifted left (up, while flying to the right) and crashed about half way through. I took a thruster on the left side and moved it the smallest fraction away from the core to imbalance the center of mass. This caused a very quick crash. So then I went back to the original design and pulled a number of the thrusters/ABs on the left/top and moved them aft to keep mass centered around the spine, but further back on the left/top side. I'm attaching am image. This seemed to correct the drift for the most part (it pulled a little right/down, then stabilized), but it seems a little crazy to have to do this.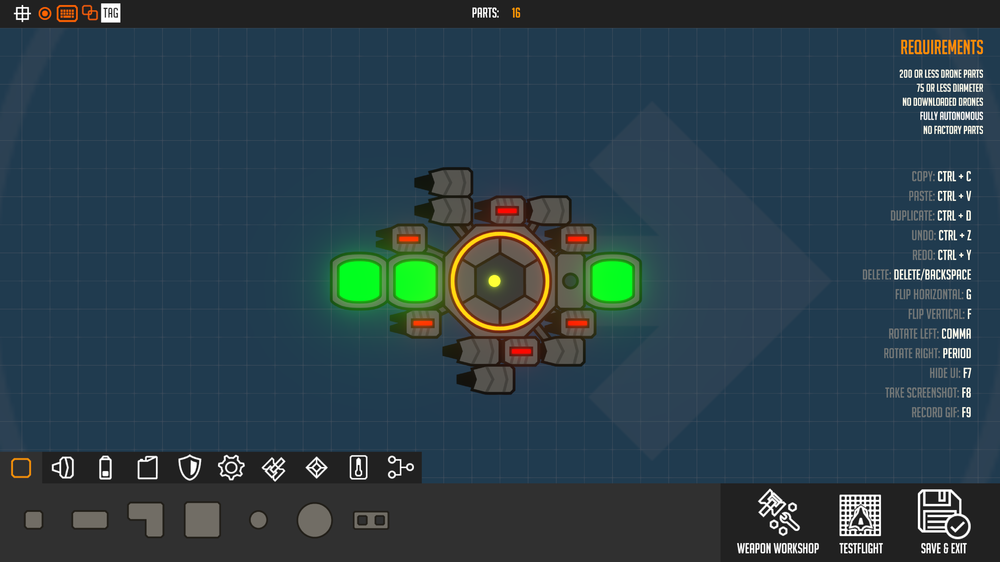
-
I'm new to the game and figuring it out, but getting my drone to fly straight in drag racing is driving me nuts. I feel like I'm designing balanced ships that are top/bottom mirrored, with fuel tanks in the middle line (even with core) in case they weigh less when fuel is used, but my ships very quickly drift down or up as if there is random air drag or something wrong with my balance. Does the center of mass moving left or right from fuel usage matter if thrusters are balanced? Am I missing something? Is it randomness caused by fuel use shifting center of mass unevenly? If so... I notice identical design ships tend to always drift the same direction, so it doesn't seem random. Is it possible to get a drone to fly straight over a long distance (without sensors and corrections) in the drag race? If not, I guess sensors are needed. If yes, could it be that there something is about the attachment "lines/connectors" between parts that is causing the imbalance -- they hide behind the drone, but do they have mass that enters the equation? Or am I just experiencing floppiness that causes random drift? I've had some success and gotten some models to finish in about 11 seconds using afterburners and regular thrusters, but the balancing seems wonky, and several bounce off the top and bottom walls/rails and are just lucky to cross the finish line. Sometimes something like adding one more pair of symmetrical thrusters (leaving center of mass where it is) will change the direction (to top or bottom) of drift. Strange. Any tips? What am I missing? This is driving me nuts. It doesn't help that I'm not great at using sensors (I'm using the laser pointer ones to sense wall and trigger perpendicular thrust into core)... they tend to under-correct and then over-correct and I end up faceplanting the wall. Thanks, Werdna


