

ababaBABABABABBA
-
Posts
56 -
Joined
Content Type
Profiles
Forums
Events
Posts posted by ababaBABABABABBA
-
-
On 6/10/2020 at 9:38 PM, Shawgoth said:
The more you get familiar with the game, the more drones you create. If they are about 10 or 15, it is simple to choose the one you want just using the slider, but it becomes more difficult as the numbers grow.
I think it would be nice to implement some directory/category/tag system to browse and filter your drones so that you can attach one or more tags to each one, or just put the drone in an in-game customizable directory (like if it was a project file).
In this way, if you want to scroll - for example - only your battle/race/sumo/etc drones, you can obtain this with just one click.100%
-
I think the campaign would be more fun to play if eventually you got all the upgrades meaning you could deploy ships without a cost and then the difficulty (enemy health, amount of enemies, multiple missions per planet, enemy firepower, etc would gradually scale up so it would still be interesting to play and build stuff late game after destroying a corp planet. Also should bring back the scattered arenas in galaxies, or add them in random encounters where you get lured or kidnapped and forced to compete, or both, this could create a better mesh between singleplayer and multiplayer and get people interested to play it if campaign mode isn't their thing.
-
On 5/21/2020 at 11:04 PM, [☣SyPhEr/ϟ\\-] ベン said:
for that I just use 2 sensors with enemy & projectiles and toggle them to filter, but that would be nice.
yeah but using that you cant tell a hammerhead from a manta
-
[reposted from July 24, 2019]
You will be able to choose a tournament to enter based on
Tiers: Based on part count
Divisions: Based on individual wins
Normal: Versus all uploaded drones
Tiers: (You will only face other drones in your tier) (another option is no minimum parts but a maximum part count)
1-25.........Featherweight
26-50.......Lightweight
51-75.......Middleweight
76-90.......Cruiserweight
91-100.....Heavyweight
Divisions: (from highest to lowest) (You will only face other drones in your division) * means number can be adjusted based on amount of drones uploaded, how many wins drones have or could have, etc
Makuuchi.......Top division..........500-∞* wins Fixed to 42* drones, the bottom ranked drone will be demoted if surpassed
Jūryō..............Second division....400-∞* wins (40 tournament wins) Drones bumped down from the top division will place here even if above 500 wins No drone limit
Makushita......Third division........300-399* wins (30 tournament wins) No drone limit
Sandanme......Forth division.......200-299* wins (20 tournament wins) No drone limit
Jonidan..........Fifth division.........100-199* wins (10 tournament wins) No drone limit
Jonokuchi......Sixth division........1-99* wins No drone limit
Wins will count from tournaments you enter or wins you gain from other players facing your drone
Division&wins and tier&part count will be displayed when in a match across all tournament modes
For approx 30s a match, winning every match, it would take 4.167 hours to get 500 wins and be in the top division
A leaderboard can be viewed where players can select a division from a drop down menu and see other drones+built by ___ along with their part count, a small image of the drone can be shown to the left of the name that can be enlarged by hovering over it for 1s
Players can also use a search bar to find a specific drone or a separate tab that shows all of their drones and stats (search bar can also search by selecting one or more attributes such as [part count highest/lowest], [wins highest/lowest], [win ratio highest/lowest] so that players can use the combination they want)
When you reach a new division there can be a congratulations screen ex. Congratulations, your drone _____ has been placed into Jonidan, the Fifth Division!
Some rewards can go along with this, such as resources, additional parts for campaign mode, a special skin that you can use, etc
I believe sumo is one of the best things about this game, and can be made much more fun than it already is 🙂
Sources for names etc
-
you want a button to activate boosters but not one side if something happens? use an and gate with that not gate something happens in input 2
if thats not it then i dont understand
-
 1
1
-
-
On 5/26/2020 at 3:08 PM, Mulakulu said:
While it does seem that just enabling tags and using those would solve your problem (top left corner when in building mode), a whole new window to show what tags are inputs and outputs and where the tags are used will be amazing. I've tried to make complex machines and just giving up near the end since by the time I've finished a section of the code, I've forgotten what all the other tags meant
you have to use abbreviations that tell exactly what it is so you wont forget
like if you have a tag on your main drone's, directional sensor, pointing to gravity, tilted left, and its a signal that goes into another gate instead of directly to something then the tag could be
m ds grav L sig
or just use the programmable leds and then write your labels for the logic sections starting with something like | since you have 3 tag lines on those
but i agree we need tag/key binding window
-
3. I dont think there is anything that can calculate the rate that your speed is increasing/decreasing if thats what you mean, but maybe you could do something with chaining speed sensors, though i dont know why you would want to know the rate of change
4. idk what you mean by this, but if you mean filtering out inputs when you dont want them, you can put the input you want in input1 and gate, then another input which will act as the clearance in input 2, output is what you want input1 to do while input 2 is giving the clearance
5. dont have an idea of what you mean by this, example?
-
On 5/24/2020 at 2:31 PM, Orange Guise said:
Also, please clarify if the Logic Splitter also splits TAGS.
it does
-
i think this is being planned in an update already
-
did you try using a logic splitter
anything attached to/under the splitter will only transfer signals to other parts also under that logic splitter line
-
you probably know this first part but
you can use and gates with input 1 being your signal and input 2 being something else to prevent or allow the signal to go through
or you can use a xor gate depending on what you are doing
part 2
sounds like you would need multiple factory parts or use a piston with a distance sensor on the logic splitter to input stuff into the minidrone (idk how big yours are)
If you are using multiple directional sensors maybe you could use multiple vtol sets instead depending on how big your minidrones are
but if you drones are going to be big they are going to take a while to reprint so again probably better to use multiple factory parts
are you trying to do it for the programmer campaign?

-
On 5/21/2020 at 11:42 AM, Roblin said:
Idea:
something should allow some but not all signals (keypresses and tags) to propogate through them.
Purpose:
lets say you have a factory part that creates individually autonomous drones (from here called the "Drone Swarm"), to do this you would currently need to use a logic splitter to prevent the steering-sensors of one swarm-drone to interfere with the steering of another, identical swarm-drone.
however, the same logic splitter would also prevent all signals from some other, regulatory drone (from here called the "mothership"), which makes it impossible to have the mothership dynamically change what the swarm targets.
for example, you might want to have the swarm able to target 4 different things, enemies, resources, mission objectives or the mouse cursor and have the mothership send signals to change what the swarm is doing, this is currently impossible without extremely cumbersome workarounds like using a remote logic connector connected to some moving part which reads the signal command and activates some sensor inside the logic splitter.
also, this would make it simple for a swarm-drone to be made aware of whether it has been disconnected from the mothership, something which currently needs to be inferred through the use of sensors, which can produce false positives or false negatives through turbulence.
also, without this functionality it is equally cumbersome to send data from swarm drones back to the mothership, for example, perhaps you want to have an exploratory drone swarm which searches for the mission objective and, when it finds it, wants all other swarm drones to gather to it. this is currently impossible.
the only current way of having a drone swarm capable of cooperatively performing more than one task is to have each drone programmed to independently judge the situation using nothing but its own sensors
or
making multiple different kinds of drones, each specialised for its own task but unable to communcate that said task is completed, meaning every kind of drone must be continously produced at all times even if most of them are not needed for the current project.
Possible Implementation Methods:
1. let there be a logic part which acts as a logic splitter (or redesign logic splitters to have this functionality) except you can name some number of signals which are propogated normally, possibly with a blacklist/whitelist option letting the player choose whether the listed signals are the only ones allowed through or the only ones blocked.
2. have a specialised IF-gate which: if it recieves the input signal then it sends the output signal through a parent remote logic connector into, presumably, a logic splitter network.
this way one can use the remote logic connector in combination with these specialised IF-gates to propogate signals from the mothership into a logic splitter.
drawback: this implementation doesn't allow swarm drones to send data back to the mothership.
you can already make a signal filter with the logic parts
-
The anchor sticks into terrain
the sticky part sticks to organic matter like enemies
-
Have a check box "auto next match" on the 'play next match' screen and then when the current match in the tournament ends it will go back to that screen, show an animation of the next circle in the line filling/lighting up (indicating you have progressed to the next match) and instead of all of the matches you won have a dot in the center, only the current match you are about to do will have a dot in the center. Then it will automatically throw you in the next match so you dont have to keep clicking the buttons if the matches last for like 5 seconds.
Also maybe have the dot indicator be a different color then the circle around it, maybe the color corresponding to the arena you are in
-
 1
1
-
-
In the editor you can toggle skins off/on and have it save that way, so when you go to different places the skins wont show
Right now you can only temporarily hide the skins with f6 but it does not carry over when you use it again -
Add an explanation for what tags are when explaining that you can bind keys to parts in the tutorial
-
1
-
-
An interactive collapsible menu that shows all the keys/tags that are currently in use, how many parts they are being used by, which parts they are used by, and select all the parts with that key/tag. You can search for specific keys/tags
-
If a part has a skin attached to it, when you select that part again the skin menu will automatically be open
when the menu opens it will automatically scroll down to show the skin that you have selected on it -
The sumo arena has had multiple looks to it, and i think they all looked cool
If you could choose the arena theme you wanted or maybe even unlock them from number of tournament wins i would love it
-
Press and hold your created weapon icon while in the weapon workshop and drag them above or below one another to freely sort them
-
1
-
-
You can make folders for drones in the hangar and move them around, option to sort by folders (would be in alphabetical order) have them at the top or the bottom
-
1
-
-
2 hours ago, Fire209 said:
Detect when certain blocks in range or when itself is/are hit or destroyed. I'm imagining reactive shields when hit might be something possible with this sensor.
yeah right now its hard to differentiate mantas from enemies that dont have projectiles
if you could sense if parts get damaged after the enemy gets detected then could solve it -
-
7 hours ago, Konchog said:
The delay gate seems to be acting differently than I imagined. Maybe it changed in the last update?
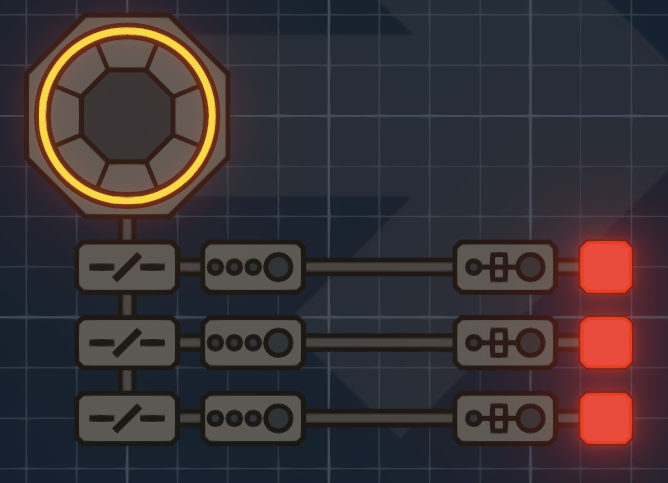
So, in the enclosed drone (see picture), the three circuits all have an impulse pause of 3 seconds, and the gate has a delay of 1 second.
From the top down, the impulses last for 0.9s, 1.0s, and 1.1s respectively.
Before you run the drone, ask yourself which LEDs are going to be lit, and at what time offset from zero are they going to be lit, and for how long?
I would have thought, bearing in mind it's a delay gate - that we would see all 3 LEDs lit, all at the 4th second, with the each LED being lit for 0.9s, 1.0s, and 1.1s respectively.
Seems reasonable, for a delay gate.
But that is not what happens.
In fact, only the bottommost LED is lit, and it is lit for 0.1 second.
So - it appears that an 'off' value sent to the delay gate while it is processing the delay just clears the gate's internal delay buffer.
filter component.drn 23.54 kB · 0 downloads
It seems that any change to the input cancels the buffer, which means it's some sort of short frequency filter. Maybe that is your intent - but I think that calling it a delay gate is a bit weird.. There's a real thing called the "gate delay" (or propagation delay) - which is the length of time which starts when the input to a logic gate becomes stable and valid to change, and ends at the time that the output of that logic gate is stable and valid to change.
The only way I can see to get the the behaviour I expected efficiently is by adding a driver - a buffer gate, which has the timing set to be equal to the delay gate. (see the following drone for the blinkenlights). While this works, it does mean that the forward timing (of the delay gate) must be repeated in the buffer gate, which doesn't seem to be correct.
I am quite willing to be told that I am ignorant and out of my depth here!
i thought about this too before
the impulse is activating the output for .9s but what i don't know is if the delay gate takes that as a single tick input regardless of the duration it's held ---
or if it takes it as a bunch of inputs, basically infinite since its being held, and then just registers the last tick when the input active held duration ends
for the delay gate to activate all the leds,
the impulse giver activation time has to be greater than the delay gate time [ 1s ]
since the top two were .9 and 1.00
they didn't register and only the bottom 1.1 did
for the delay gate holding the led on
the delay gate doesn't have a held output so it should be one tick
but the input isn't one tick
its technically infinite ticks
but if it worked by registering the held tick inputs as infinite and then doing the output for each tick of the input which would make it register as infinite
then maybe the delay gate would output each tick, or have infinite ticks for the duration of the input that went into it
instead of infinity the game could just immediately activate another tick if it's 'held' so there isn't a gap, its not technically infinite seamless but it would simulate no gaps and then the delay gate would output each tick that went into it
idk if the game can recognize infinity, if the smallest possible time it can do is in fact one tick
this would mean that if
impulse held output --> .9 | delay gate --> activates the first tick after the set delay time and then continues activating the rest of the ticks comprised in the .9 input for .9 seconds
so in the example there was a 1 second delay time
that would mean that the led will light 1s after the very first tick from the impulse held output and it should light up for .9s
first tick == '
first and ending ticks == |
[3s]---------------->['] <no gap> [starts delay gate 1s]--------->|------------------------------------->[.9s]---------------------------------------------->|
(impulse wait) ^ ^ ^ (activation stops when delay gate uses all ticks)
^> |-------------->[.9s]--------------->| ^ > > > > > > > > ^
^ (impulse held time output ^ (delay gate keeps getting ticks)
^ immediately? fills with ticks) ^
^ ^
^ > > > > > > ^
(delay gate takes 1st tick)
i think the way it works now is that it if the input is still not being pressed after the delay finishes it won't activate
so a more accurate name would be a trap gate (may or maynot exist in real life)
probably needs a description like Waits for the input key to be activated for a set time, then activates output key.
tell me if there is something wrong
also check this out
the battery full output is not going to the delay gate input
but it is lighting the battery full led
it's not starting below full so should at least put out one tick of battery full
but it must be doing that because the led is lighting
but then why isn't it going to the delay gate input

Add the ability to order which batteries/fuel tanks should drain first
in 1.2 Update Feature Requests
Posted
bump