

Century Orion
-
Posts
9 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Posts posted by Century Orion
-
-
First of all, I'm unable to post this in the suggestions tab because the site keeps giving me a 403, so maybe that could be another thing to help me out with.
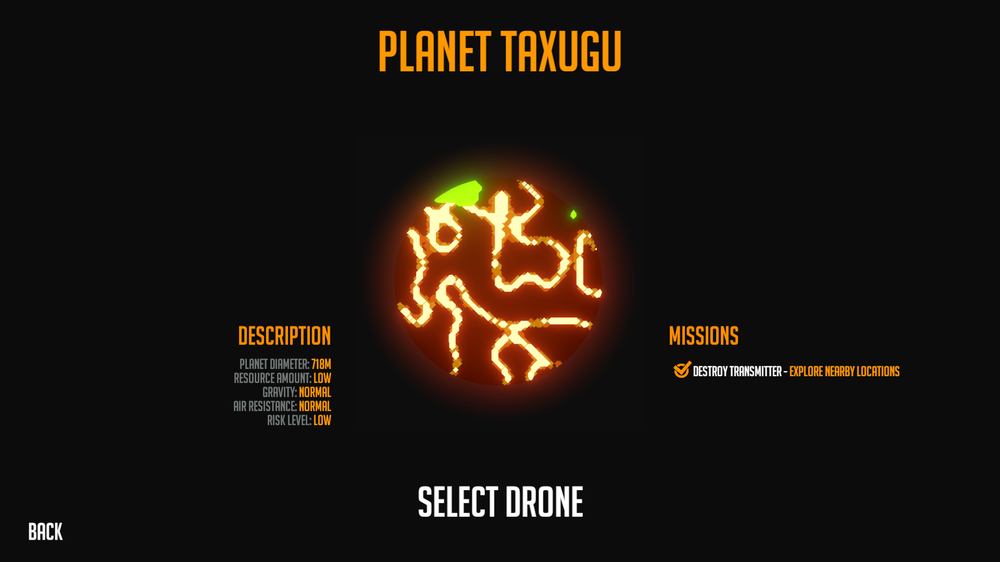
This planet shows me that there are two pools of resources on the planet's surface. I take the time to go around the planet twice using the transmitter as a marker, and I don't see anything.
I even drill through the planet from two sides to see if there could be any resources at all (I'm at the center), but there still aren't any resources.
I would really like it to be more accurate. It doesn't even have to be completely accurate, especially if they're underground because who might bother checking the overview? I just want to make sure a planet has resources and not be fooled and waste my time.
-
19 hours ago, jbox1 said:
You'll know what I mean soon enough.
Ah, OK. Not as slow as I thought it would be.
-
15 hours ago, Markus said:
@Century Orion I can totally understand. The Sumo Mode only works with fully autonomous Drones, which have a bit of a steep entrance hurdle currently. I would love to make it easier.
I think the first step to make an autonomous Sumo Drone is to make a pusher: Create a drone which simply flies forward. You place your thrusters that they are aligned in a way that when you activate them, you fly straight to the right. Then you use the "Button" Logic-Part, which simulates a keypress. Use a key as "Output" and then have all the thrusters use that key as "Input". Now you have a self-flying drone.
One of the next steps is, you use "Distance Sensor"-Parts to maneuver your drone. Each Distance-Sensor casts a ray, and if the ray hits something, it outputs a keypress. That keypress can you use, to trigger other thrusters. This is useful to detect either the enemy or the Sumo-Border.
More advanced is the Directional Sensor, which you can use to position your Drone relative to the Center of the Ring or towards the enemy drone.
If you have any questions, we are happy to help. Also consider joining the Nimbatus-Discord, as there are always active players which love the Sumo Mode
")
Could you tell me what tolerance is for the directional sensor?
-
 1
1
-
-
3 minutes ago, jbox1 said:
This is dependent on whether you're using the demo or the closed alpha.
Demo:
On the drone brain, you can set a keybinding to "release drones". This will release a number of little harvesting drones that will (painfully slowly) mine the resources around you.
Closed Alpha:
There is a separate tab for harvesting resources in the build menu. To harvest resources, you will need a recourse collector, and a recourse tank of the appropriate type. Then, you will need to go out and use the recourse collector to suck up the resources into the tank. Once the resources are all collected, or the tank is full, return to the recourse "bucket" (below where you spawned) to dump your resources in it for use in research.Painfully slowly? Has God intended me to suffer?
-
As someone new to the game, this seems very confusing to make.
-
2
-
-
I would just like to know how you can make use of the green part of the terrain, which I'm pretty sure is used as currency. I drill or shoot it, but it doesn't seem to help me in any way.
-
This ship moves as it should in testing or another planet, but is completely unmovable in the arena.
-
1
-
Make Visuals More Accurate
in Discussion & Feedback
Posted
I'm only trying to say that if there aren't any resources on a planet, then the visuals shouldn't have them, either. It's misleading and could cause a waste of time as it often takes long to dig through a planet.